Robotics and artificial intelligence offer fascinating possibilities, and this project is a concrete example of that. I designed and built a 3D-printed robotic hand, fully controllable via a Python program. This project was part of a year-end assignment during my final year of secondary school in 2023, focused on object-oriented programming. It evolved to include two control modes: a graphical interface and a gesture recognition system using a camera.
Objective.
The goal was to create a functional robotic hand capable of performing various movements in response to program commands. To make the experience interactive, I implemented two control modes:
- Manual mode with a Tkinter interface: the user can adjust the position of each finger through an intuitive interface.
- Camera mode with OpenCV: the hand follows the user's gestures detected in real time by a camera.
Demo.
Technologies used.
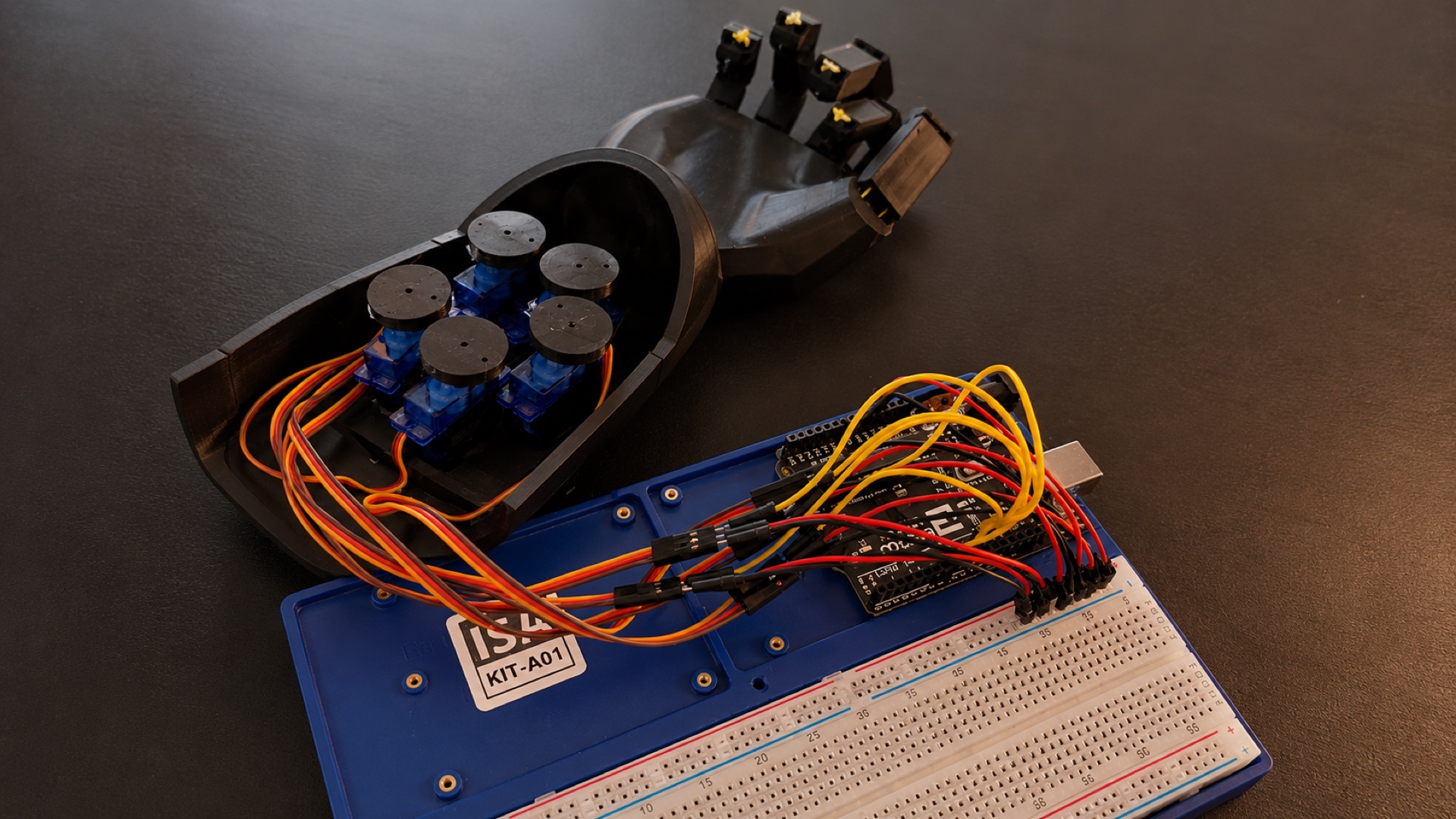
- Hardware: Arduino, servo motors, 3D printing (PLA).
- Software: Python, Tkinter, OpenCV, Arduino IDE.
- Communication: serial port between Python and Arduino.
Challenges and solutions.
- Latency: gesture recognition had a slight delay initially. Optimizing video processing and using MediaPipe improved responsiveness.
- Code architecture: a more dynamic approach replaced the initial idea of a predefined movement library, making control more intuitive and fluid.
Conclusion.
This project let me explore several areas at once: programming, computer vision, electronic design, and 3D printing. The robotic hand is fully functional and could be enhanced with sensors or AI to improve gesture recognition. Source files, videos, and 3D models are available. Feel free to reach out.